6、实验观察到Futaba和HiTec伺服控制器板由二极管保护组成,这是成功控制这些伺服系统的原因 。
(3)攻击效率
攻击的效率取决于频率(fa)和与受害者共振频率(fv) 。攻击者可以使用受害者的共振频率来增加攻击距离 。下一大节讨论检测受害共振的分析和实验方法 。
(4)实验结果
文章插图

文章插图
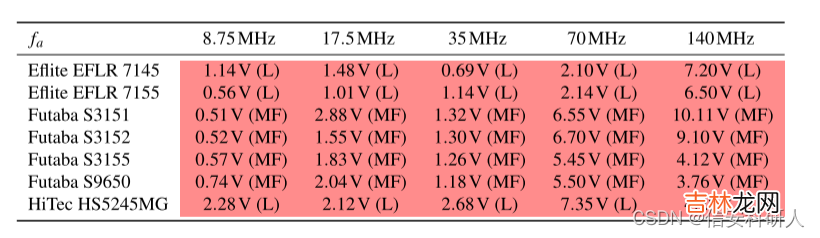
?编辑 第二行第一列对应的是上一张实验图中伺服电机的各组成电机,可以观察到,所有伺服模型都可以用不同的攻击功率(VP)来阻塞 。
3.1.2 攻击波形 ⅠⅠ :BLOCK & ROTATE上节的块波的作用简单说就是阻止旋转角数据向致动器传输,那么这一节需要做到,注入错误的致动数据 。
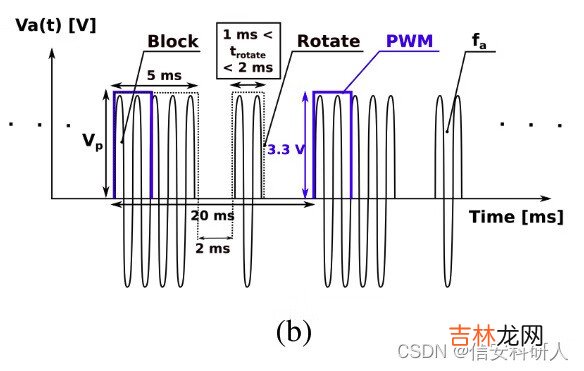
具体思想可以简述为:利用一种波形掩盖或消除原有的旋转数据,然后注入构造好的错误致动数据,掩盖方式可以为宽脉冲(thigh>2ms)

文章插图
文章插图
?编辑
让无人机机翼停转:
(1)上图可以看到,正常旋转的范围是1~2ms,作者实验观察到,当thigh>2ms时,PWM所携带的信号全被覆盖,所有的伺服模型电机都保持原形 。
(2)当Eflite和Hitec伺服器锁定时 (即,外部扭矩不能移动它),观察到双叶伺服器自由移动 。
(3)当PWM通道中没有旋转角数据时,Eflite和Hitec的响应可能是保持伺服旋转稳定 。
注入错误的旋转指令信号:
(1)使用额外的正弦脉冲来注入错误的旋转角度信息 (图4b中的 “旋转” 脉冲) 。
文章插图
文章插图
?编辑
(2)旋转脉冲的持续时间(trotate的宽度)决定了注入受害者系统的错误旋转角度 。例如,攻击者可以使用trotate = 1ms的Block & Rotate波形 (图4b) 将伺服机构旋转到-45 ° 。
批注:很多这种信号注入攻击,注入指令的前一步都是阻塞原有的服务,然后将自己构造的命令注入到这个信道以劫持通信 。
3.1.3 攻击波形 III:完全控制

文章插图
文章插图
?编辑
整个无人机可以操作(即左右旋转45度)的时间范围trotate,从下图可以得知为[1ms,2ms]:
文章插图
文章插图
?编辑
tPWM为20ms,那么这个占空比就是[1/20,2/20]也就是5%到10% 。攻击1和攻击2都是在固定的占空比范围内进行操作,那么超过这个占空比呢?
因为thigh的范围和trotate相关,要做一些电机操作,所以是固定的[1,2],所以只能通过变小tPWM来增大占空比 。
【一 CPS攻击案例——基于脉冲宽度调制PWM的无人机攻击】实验观察到,当这个tPWM变小到2.5ms的时候,也就是占空比范围到[40%,80%]的时候,在这个范围内,无人机内的每个伺服服务组件都可以通过增加PWM的占空比来控制:
经验总结扩展阅读















- C语言下for循环的一点技巧总结
- 奥运会办几天
- qq拍一拍怎么设置文字
- 99NBA选秀顺位名单
- 高铁上嫌冷怎么处理
- 一瓶500ml啤酒的热量
- 一个人的夜说说
- 朝鲜蓟的养殖方法
- 飞机座位充电口在哪
- 王者荣耀是一个词语吗