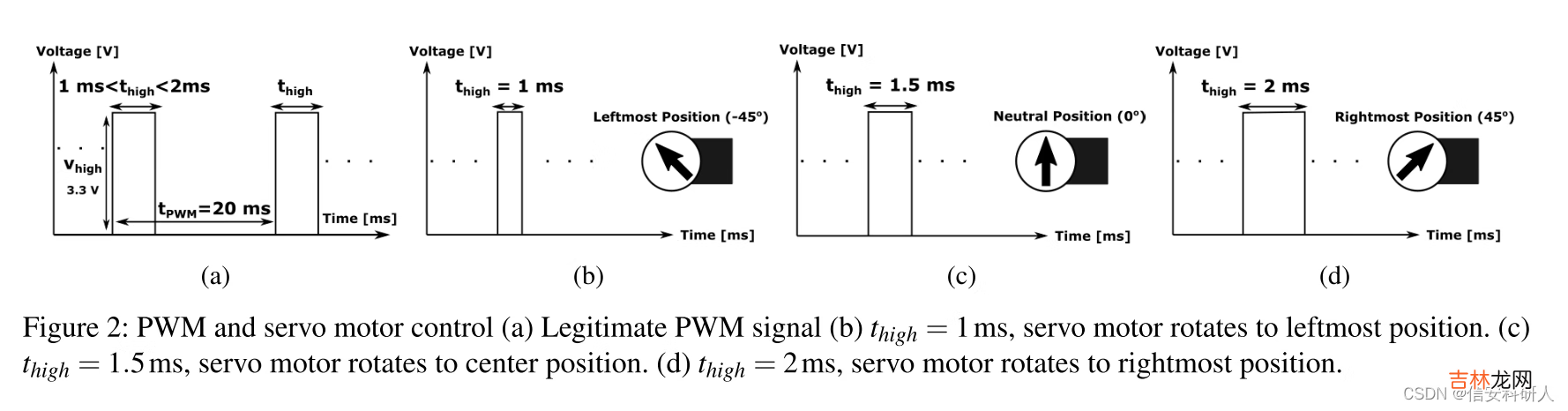
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置 。通用伺服电机的总体旋转角度为90 °(注:不难理解一个主机翼顺时针转90°和逆时针转90°基本上能够覆盖所有操作角度),并随着thigh的增加沿顺时针方向旋转 。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象 。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出 。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降 。
例如,thigh = 1ms、1.5ms和2ms分别对应于旋转角度-45 ° 、0 ° 和45 °,如下图的2b、2c和2d所示 。
文章插图

文章插图
?编辑
2.3.2 致动器使用PWM的上升沿和下降沿之间的持续时间确定致动数据 致动器有两种选择来处理PWM编码的信号对应的致动数据:
- 首先,通过检查PWM脉冲的上升沿和下降沿;
- 其次,可能用低通滤波器取PWM的平均值 。
问题来了,什么是上升沿和下降沿?数字电平从0变为1 的那一瞬间叫作上升沿 ,从1到0的那一瞬间叫作下降沿 。
2.4 攻击场景设定FAI 攻击低功耗且无法追踪,并且只通过 EM 耦合攻击来改变受害者的 PWM 信号 。最大攻击功率限制为 20W,可通过 COTS 放大器获得 。
场景一
第一种攻击场景中要求功率较低,攻击者旨在阻止驱动数据以使受害者的驱动控制无效,但不注入错误命令 。
场景二
在第二种攻击场景中,攻击者需要注入虚假驱动数据来控制受害者的驱动器 。
攻击者可以访问放大器和天线等射频组件,以及有关受害系统拓扑的信息,例如 PWM 电缆长度 。
三 攻击方案、原理与实验设备3.1 测试攻击波形对通信信号的影响

文章插图
?
文章插图
编辑蓝色虚线框是受害者系统,也就是无人机系统,红色虚线框是攻击者 。
首先看受害者这边有什么:从左往右看
Futaba是带有地面无线电控制器的无人机系统,该控制器将操作人员的控制命令发送给无人机;
无人机中的自动驾驶仪Pixhawk,将控制器发来的控制信息转为PWM信号,并发送给伺服电机;
再就是Servo Motor,就是接受PWM信号的伺服电机,最底下那个实线蓝色框就是无人机的电机们 。
再看看攻击者这边有什么:从右往左看
先是包络发生器,什么是包咯发生器呢?
Envelope generators provide a means for shaping the waveforms to produce a more musical character. Most commonly, envelope generators are used to modulate amplitude over a period of time. They come in a variety of configurations, but the most prevalent type of envelope generator is an ADSR envelope.
包络发生器提供了一种塑造波形的方法,以产生更具音乐性的特征 。最常见的是,包络发生器用于在一段时间内调制振幅 。它们有多种配置,但最流行的包络生成器类型是ADSR包络 。经验总结扩展阅读
- C语言下for循环的一点技巧总结
- 奥运会办几天
- qq拍一拍怎么设置文字
- 99NBA选秀顺位名单
- 高铁上嫌冷怎么处理
- 一瓶500ml啤酒的热量
- 一个人的夜说说
- 朝鲜蓟的养殖方法
- 飞机座位充电口在哪
- 王者荣耀是一个词语吗